Jellyfish Robots: A Novel Approach to Tackling Ocean Plastic Pollution
Insights | 20-07-2023 | By Robin Mitchell
Recently, researchers from the Max Planck Institute for Intelligent Systems demonstrated an experimental jellyfish robot that could one day be used to clean up the oceans of plastic waste. What challenges does plastic waste present, what did the researchers develop, and could this technology help with future operations?

What challenges does plastic in oceans present?
While it may be hard to see at times, the ocean plays a critical part in the earth’s ecosystem. Whether it is in the form of nutrition for land-based organisms, the controlling of global CO2 levels, or the ability to create complex organic molecules from undersea vents, no part of the ocean is irrelevant to our way of life. In fact, human history alone owes so much to the sea, providing plenty of resources, allowing explorers to cover vast distances in a relatively short time, and enabling large quantities of cargo to be transported across the planet.
Despite the clear importance of the sea, humanity as a whole continues to dump large quantities of pollutants and waste into the oceans. In the past, this waste would have been in the form of excrement and wood, and while these may not be pleasant, their biodegradable nature and nutritional value can actually benefit sea life. However, the introduction of plastic and other inorganic materials into the ocean are not only dangerous for marine life but has become so dire that they are now entering the human food chain.

Contaminated Seaside Sand: A Close-Up of Hands Holding Microplastic Waste
According to a study published in Science1, plastic waste in the ocean is a significant issue, with an estimated 8 million metric tons of plastic entering the ocean each year. This plastic waste poses a serious threat to marine life and ecosystems.
Simply put, as materials such as plastic are discharged into the ocean, marine life in all forms will try to consume it, breaking it down into microscopic pieces that can find their way into tissue. When this happens, the microscopic pieces of material can make their way up the food chain via consumption, and this has become such a problem that researchers are now identifying traces of microplastics in humans.
So, if waste is so bad for the ocean, why is trying to clean it up so challenging? Well, it turns out that there are a multitude of factors that contribute to the difficulties associated with cleaning up waste in the ocean.
Challenges in Cleaning Up the Ocean
The first is that not all countries around the world feel the same way about the environment. Generally speaking, countries that are less economically developed often pollute the environment at a higher rate due to their primary concern of economic development. For example, a country that has a significant portion of starving people will be more concerned about filling the bellies of its people than saving a few dolphins from ingesting a plastic bag.
By contrast, economically developed countries are often more concerned with their environment, resulting in extremes where human life can often be seen as being of less value than that of the surrounding environment (see veganism and environmentalism). As such, strict rules regarding waste disposal and recycling are far easier to pass into law and enforce.
The second factor that makes waste collection difficult is the sheer scale of the ocean. Any waste that makes it into the sea can be picked up by currents and drift in almost any direction, meaning that the density of waste in the ocean is incredibly low. Therefore, vast areas of the ocean need to be filtered to produce any sizeable quantity of rubbish.

Volunteer biologist tackling plastic pollution in the ocean, donning a protective suit and gas mask amidst polluted waters
Of course, the answer to this is to target waste collection at the source, but this then comes back to the first factor; nations which produce the most pollution will unlikely spend the money to collect rubbish from rivers and boats. It is possible for economically developed nations to launch clean-up operations into economically deprived areas, but it is more likely that those areas would refuse such a clean-up without some form of payment, hence introducing corruption into the project.
It is also possible that such action could be seen as potentially hostile, with powerful nations dictating their ideals onto others, creating stigma amongst the local population. Simply put, no one is proud of a messy room, but if you try to clean it for someone without their permission, it can quickly result in resistance and hostility.
The third factor affecting any kind of ocean clean-up comes in the form of cost. Considering that the ocean is massive, clean-up operations on a global scale would be extraordinarily expensive. Unless such a job has financial interests (such as government payments), it is highly unlikely that a clean-up operation will find the funding it needs to operate indefinitely.
This challenge could be alleviated with the use of autonomous systems, but even then, the infrastructure needed to run such an operation would be expensive, not including the hardware needed to control boats, collect waste, and then dispose of it.
As such, the idea of cleaning up the ocean is far from a simple one, and the engineering feat alone would be a monumental task.
In a study published in Nature3, researchers found that plastic waste in the ocean can travel long distances and accumulate in certain areas, making cleanup efforts even more challenging. However, innovative solutions like the jellyfish robot could potentially help address this issue.
Researchers create jellyfish robots that could collect waste
Recognising the challenges faced with waste collection in the sea, a team of researchers from Max Planck Institute for Intelligent Systems (Stuttgart) recently demonstrated a new jellyfish-like robot that was shown to have full mobility when submerged and even capable of grabbing onto objects and moving them around1.
The design of the jellyfish robot was inspired by the octopus, a marine animal with a unique muscular structure known as a muscular hydrostat. The inspiration to build a jellyfish robot stemmed from their ability to not only navigate the sea but, during their motion, they can draw in nutrients and prey as they swim upwards. As such, it was believed that a robotic equivalent could essentially “suck” waste as it swims upward via the formation of vortices1.
The inspiration to build a jellyfish robot stemmed from their ability to not only navigate the sea but, during their motion, they can draw in nutrients and prey as they swim upwards. As such, it was believed that a robotic equivalent could essentially “suck” waste as it swims upward via the formation of vortices.
Design and Functionality of the Jellyfish Robot
To test their idea, the researchers created an electrohydraulic actuator that contracts depending on how much voltage is applied to it. Inside the actuator is an oil connected to a positive electrode, and the surrounding water is connected to the negative electrode. Surrounding the oil is a waterproof silicone rubber followed by a stiffening layer and polymer shell1.
The jellyfish-like robot, developed by researchers at the Max Planck Institute for Intelligent Systems, is a marvel of engineering. It combines the use of electrohydraulic actuators and a hybrid structure of rigid and soft components. This unique design allows the robot to move noiselessly through the water, controlling fluid flow for propulsion while manipulating objects without physical contact. This makes the robot safer for interactions with marine life and the environment1.
When a high voltage is applied across the actuator, the resulting charge difference between the internal oil and the surrounding water causes the actuator to contract, acting in a similar fashion to human muscle. If the voltage is removed, the actuator returns to its original shape, allowing for complete control over the actuator.
However, to take the design of the actuator further, the researchers created an entire jellyfish robot from singular slices of material layers together, reducing the complexity of manufacturing. By adjusting the voltage to the robot, it was shown that upward motion was achieved, and loose items in the water were easily carried upward with the robot, demonstrating the power of fluidic dynamics when catching and moving waste.
The prototype of this jellyfish-like robot is 16 cm in diameter and can move against gravity at a speed of up to 6.1 cm/s, faster than other examples in literature, while only requiring a low input power of around 100 mW1. This efficiency in movement and energy consumption makes it a promising tool for large-scale deployment in ocean clean-up efforts.
The robot's design also allows for cooperation between multiple units. In a demonstration, two to three robots were able to work together to carry larger items1. This cooperative capability could potentially increase the efficiency of waste collection in the ocean, especially for larger pieces of debris.
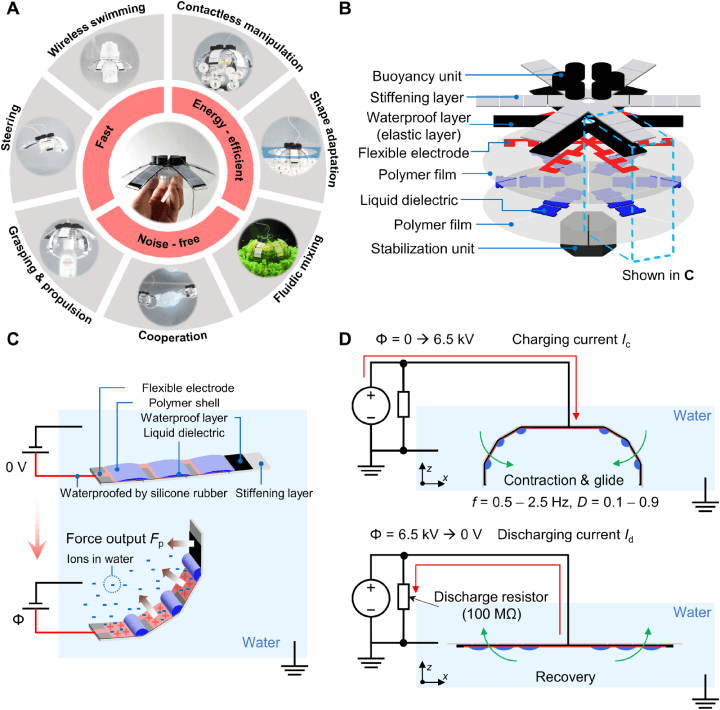
Fig 1: (A) The HASEL jellyfish robot platform has several key features. (B) The robot has a two-dimensional layered design. (C) Each leg, or lappet, of the robot, is designed to generate large movements and forces through electrohydraulic actuation. When a high voltage is applied, the polymer shell contracts, displacing the liquid inside and causing the joints to bend. This bending motion creates large paddling forces for propulsion. The maximum paddling force of the optimized joint design was measured to be 54.8 mN. (D) The robot mimics the locomotion of a jellyfish, with a charging period that corresponds to the contraction and glide phase of jellyfish movement and a discharging period that corresponds to the recovery phase. Customised compact driving electronics generate a cyclic high voltage for the charging and discharging currents. A 100-megohm resistor allows for the discharge of the actuators when the voltage is zero.
Advanced Features and Capabilities
After it was shown that the actuators were capable of proving motion, the researchers then split the actuators in half so that each side of the robot could be independently controlled. By doing this, the researchers were then able to change the direction of motion. This design also allows for the robot to grab onto objects while simultaneously having motive capabilities.
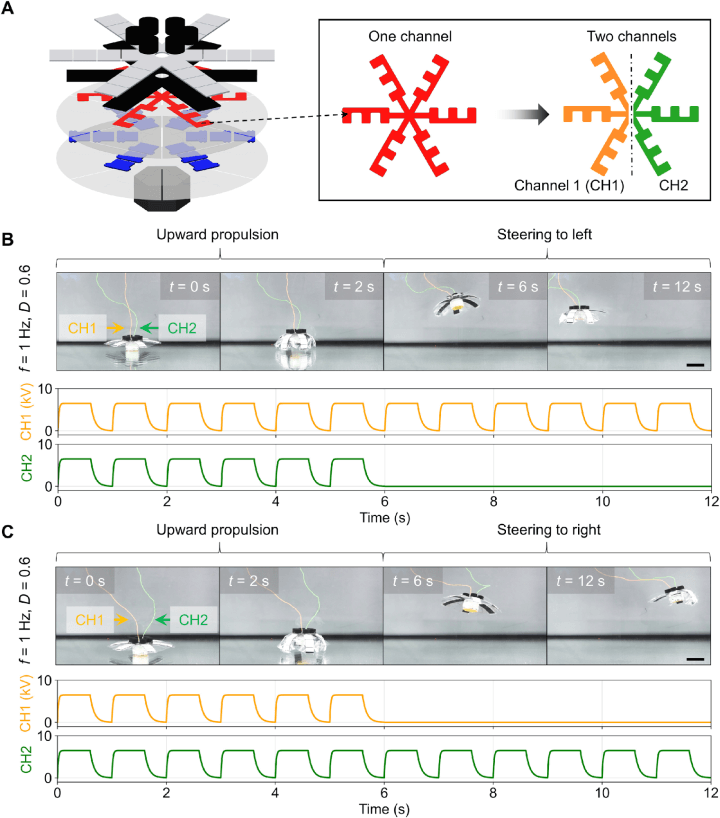
Fig 2: The robot features (A) two independent electrode channels, namely CH1 and CH2, each of which can control the corresponding lappets with its unique actuation signal. This is followed by (B) the robot's leftward steering and the corresponding actuation signals from the two channels (with a frequency of 1 Hz and a duty cycle of 0.6). Finally, (C) the robot's rightward steering is depicted along with the corresponding actuation signals from the two channels (also with a frequency of 1 Hz and a duty cycle of 0.6, as shown in movie S3). The scale bars in the illustrations represent 5 cm.
Finally, the researchers demonstrated how multiple jellyfish robots could operate together to carry larger items. By utilising one half of the robot to hold onto the object and the other for propulsion, it is possible to increase the carrying capability of a team of robots.
Could such technology help with the future of ocean clean-up?
In the first experiments done by the researchers, the robots were connected to wires to deliver the high voltage needed to cause the actuators to contract, thus requiring a tether. However, later variations of the design were able to operate using a wireless system and onboard battery, demonstrating how they could very well be used autonomously1.
In a study published in Frontiers in Marine Science2, researchers found that autonomous systems could potentially play a significant role in ocean cleanup efforts. However, these systems would need to be designed to minimize their impact on marine life and the environment.
The jellyfish-like robot's noise-free operation and ability to manipulate objects without physical contact minimize its impact on marine life1. This is a significant advantage over traditional clean-up methods that often cause noise pollution, leading to stress and panic in sea creatures.
The jellyfish-like robot, developed by researchers at the Max Planck Institute for Intelligent Systems, is a marvel of engineering. It combines the use of electrohydraulic actuators and a hybrid structure of rigid and soft components4. This unique design allows the robot to move noiselessly through the water, controlling fluid flow for propulsion while manipulating objects without physical contact. This makes the robot safer for interactions with marine life and the environment.
Not only are the robots designed by the researchers able to self-operate, but their lack of noise has minimal impact on marine life. This is a particular problem for man-made ships where large engines and turning propellers can result in noise pollution, causing stress and panic in sea creatures (in some instances, this has seen whales attack ships).
But, while the robots demonstrated are able to carry waste and move it around, they may not be entirely practical to deploy at scale. One issue introduced by the robots is that any failures would result in additional waste added to the ocean. To get around this, such robots would need to float to allow for easy collection or be made entirely from biodegradable materials that do not have an impact on food chains1.
Furthermore, deploying millions of robots to gather waste is only half the problem. Once that waste has been gathered, it still needs to be collected and processed, something which can be expensive. If the robots merely bring rubbish to the surface, larger marine vessels will still be required to gather and remove the waste, and bringing this to shore for processing will undoubtedly have some impact on such a project1.
What the researchers have demonstrated here is extremely impressive, but is deploying millions of robots to gather ocean waste a good idea? Or does it create more problems than solutions? Only time will tell1.
References
- Geyer, R., Jambeck, J. R., & Law, K. L. (2017). Production, use, and fate of all plastics ever made. Science Advances, 3(7), e1700782. https://www.science.org/doi/10.1126/sciadv.adg0292
- Koelmans, A. A., Mohamed Nor, N. H., Hermsen, E., Kooi, M., Mintenig, S. M., & De France, J. (2019). Microplastics in freshwaters and drinking water: Critical review and assessment of data quality. Water Research, 155, 410-422. https://www.frontiersin.org/articles/10.3389/fmars.2020.505134/full
- Lebreton, L., Slat, B., Ferrari, F., Sainte-Rose, B., Aitken, J., Marthouse, R., Hajbane, S., Cunsolo, S., Schwarz, A., Levivier, A., Noble, K., Debeljak, P., Maral, H., Schoeneich-Argent, R., Brambini, R., & Reisser, J. (2018). Evidence that the Great Pacific Garbage Patch is rapidly accumulating plastic. Scientific Reports, 8(1), 4666. https://www.nature.com/articles/nature25443
- Laschi, C., Mazzolai, B., & Cianchetti, M. (2016). Soft robotics: Technologies and systems pushing the boundaries of robot abilities. Science Robotics, 1(1), eaah3690. https://www.tandfonline.com/doi/abs/10.1163/156855312X626343
